-
-

Cover Page
-
Team
-
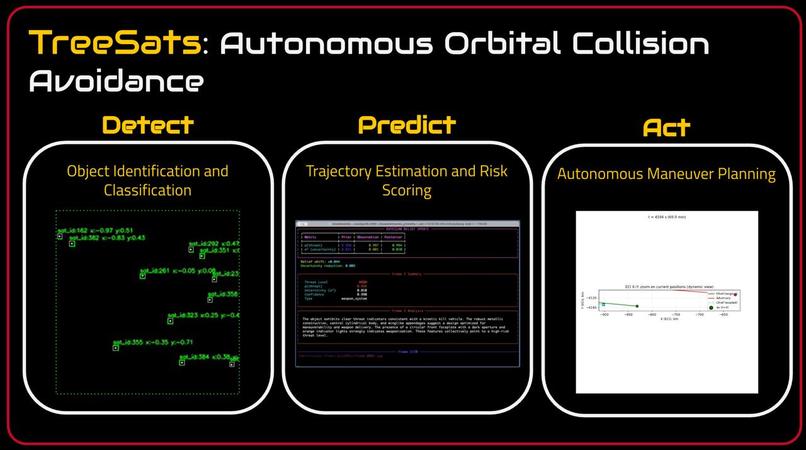
Pipeline
-
 GIF
GIF
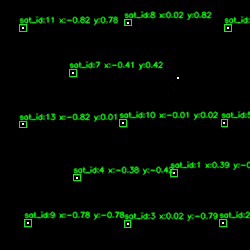
Fine tuned YOLO model detecting distant satellite
-
 GIF
GIF
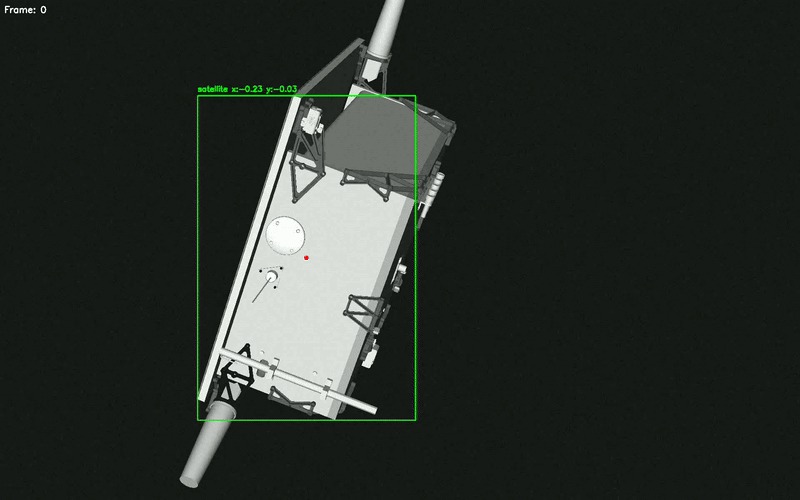
Fine tuned YOLO model detecting nearby satellite during proximity operations
-
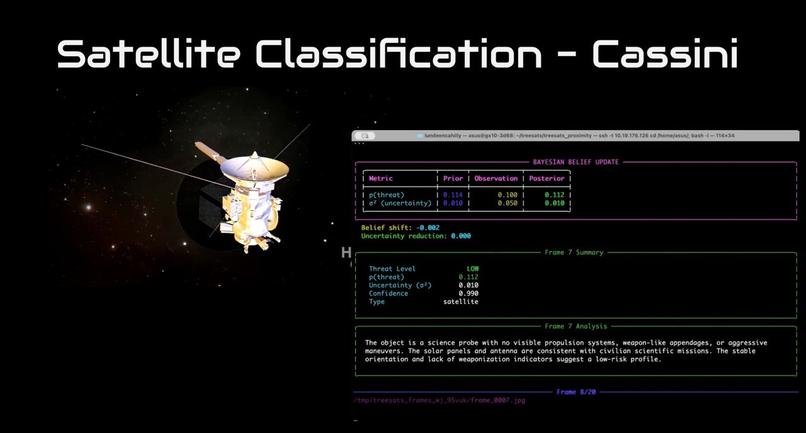
Using NVIDIA Cosmos Reason 2 VLM to conduct visual threat assessment of unknown satellite
-
 GIF
GIF
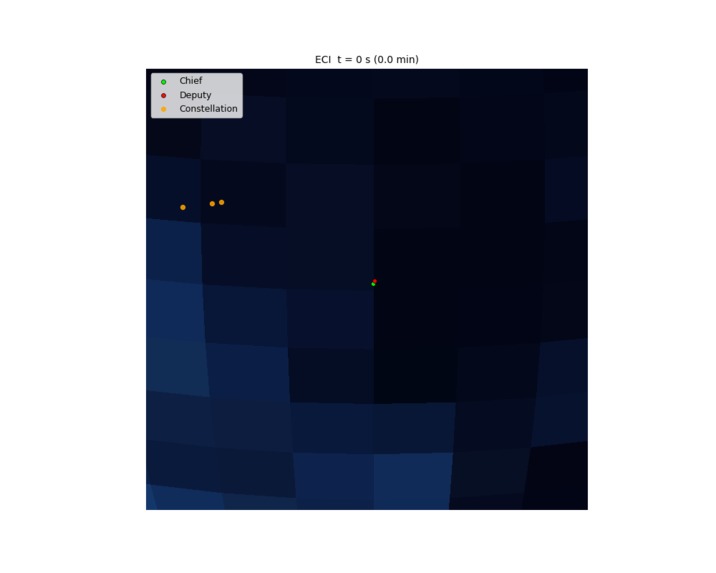
Collision detection and avoidance
-
 GIF
GIF
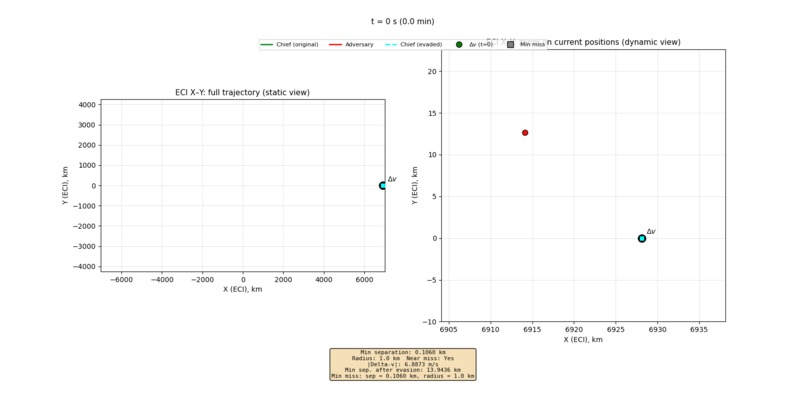
Avoid collision with an adversarial satellite
-
 GIF
GIF
Actively evade a maneuvering adversarial spacecraft









The Problem
Tens of thousands of satellites orbit Earth today. SpaceX alone plans 1 million by 2030. At that scale, ground-based collision avoidance doesn't work, especially when communications and GPS jamming are expanding across Ukraine, Taiwan, Iran, and Myanmar, now affecting commercial satellites.
The constraints:
- Satellites can't wait for ground commands when collisions are imminent
- Communication windows are limited or denied in contested regions
- GPS is unavailable or jammed
- Collision windows are measured in minutes, not hours
Current satellite operators rely on ground stations for collision warnings and maneuver commands. This doesn't scale to mega-constellations in communication-denied environments.
The Solution
StarGuard provides autonomous collision avoidance and threat assessment using only onboard star tracker cameras—no ground link or GPS required.
Three autonomous capabilities:
- Collision Detection - YOLOv8 detects satellites/debris in star tracker imagery, BoT-SORT tracks objects across frames, UKF estimates trajectories from angles-only measurements
- Collision Avoidance - Convex optimization computes fuel-optimal evasive maneuvers
- Threat Assessment - NVIDIA Cosmos VLM classifies satellite types and assesses maneuver intent
All processing happens onboard via edge compute using existing spacecraft hardware (star trackers).
How It Works
1. Orbital Simulation (Training Data Generation) Used Tensorgator (GPU-accelerated Keplerian propagator) to simulate 10,000+ satellite constellations and generate synthetic training data for sensors. Built a pinhole camera model to render 256×256 star tracker images from the satellite's frame, auto-labeled via brightness thresholding—satellites appear as bright spots against space.
2. Computer Vision Pipeline (Detection & Tracking) Fine-tuned YOLOv8 for tiny satellite detection (3-5 pixel objects), integrated BoT-SORT for persistent tracking across frames. Extracts pixel coordinates → bearing angles (elevation/azimuth).
3. Angles-Only Navigation (State Reconstruction) Reconstructs full 6-DOF state from sequential images:
- 1 photo → bearing angles
- 2 photos → bearing + depth → position vector
- 3 photos → finite difference → position + velocity
4. State Estimation (Trajectory Prediction) Unscented Kalman Filter fuses orbital dynamics (Keplerian propagation) with star tracker measurements for noise-resistant trajectory estimates and collision prediction.
5. Collision Avoidance (Maneuver Planning) Convex optimization solver (CVXPY) computes minimum-ΔV maneuvers subject to collision constraints, fuel budgets, and thrust limits.
6. Threat Assessment (Object Classification) NVIDIA Cosmos Reason VLM via vLLM provides real-time satellite classification from proximity operations imagery—identifies satellite types and assesses maneuver intent.
Technical Challenges & Solutions
Angles-Only Navigation: Reconstructing 3D trajectories from 2D bearing angles is ill-posed. Solved by leveraging temporal information across multiple frames and constraining solutions with orbital dynamics.
GPU Orbital Mechanics: Kepler's equation (M = E - e sin E) requires iterative numerical methods. Optimized Newton-Raphson for CUDA with vectorized operations across 10k+ satellites—reducing simulation time from hours to seconds.
Tiny Object Detection: Satellites appear as 3-5 pixel bright spots in star tracker imagery. Required careful YOLOv8 hyperparameter tuning and augmentation strategies for robust detection.
Real-Time Onboard Performance: Star tracker processing, detection, tracking, and maneuver planning must happen in real-time onboard with limited compute. Achieved through efficient model selection, GPU acceleration, and edge compute optimization.
Key Results
- End-to-end autonomy: Raw pixels → executed safety-constrained maneuvers with no human in the loop
- Fully automated pipeline: Zero manual labeling—synthetic data generation with auto-labeling
- Scalability: Handles mega-constellations (10,000+ satellites) on consumer GPUs
- Production-ready: Uses only existing spacecraft hardware (star trackers)
- Communication-independent: Operates without GPS or ground contact
Impact
StarGuard enables satellites to operate autonomously in communication-denied environments—critical for mega-constellations, commercial satellites over contested regions, and national security missions where ground contact is limited or unavailable.
Technical Insights
- GPU parallelization transforms orbital simulation from hours to seconds
- Sequential observations + dynamics constraints enable angles-only navigation
- Star tracker imagery is ideal for object detection—high contrast, known background
- Convex optimization guarantees globally optimal collision avoidance solutions
- VLMs can run efficiently enough for real-time onboard inference and complex threat assessments
What's Next
- Embedded deployment on radiation-hardened flight computers
- Multi-sensor fusion (star tracker + IMU + magnetometer)
- Cooperative avoidance protocols for inter-satellite coordination
- Hardware-in-the-loop testing on satellite testbeds

Log in or sign up for Devpost to join the conversation.