-
-
Logo
-
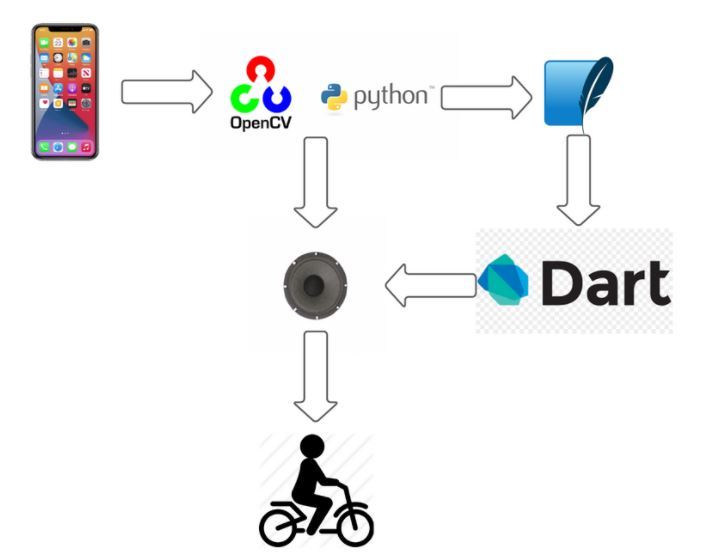
Data Model
-
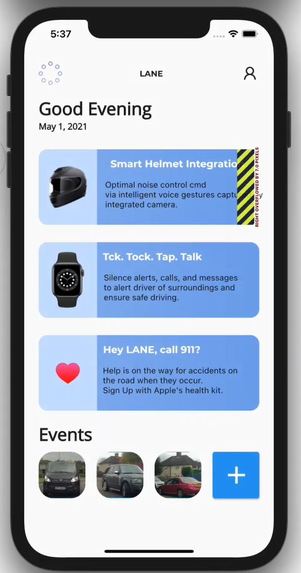
Home page
-
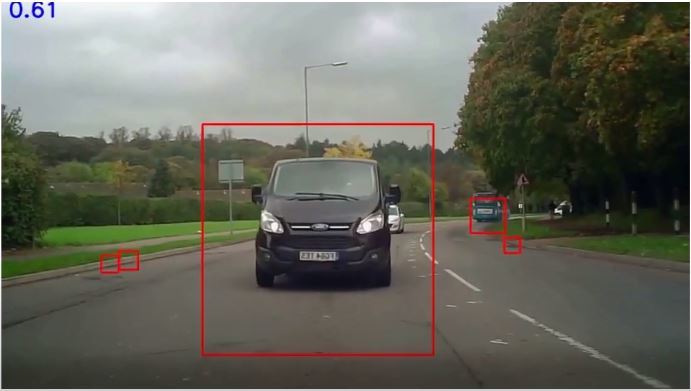
Computer Vision Algorithm with Distance (in meters) on the top left corner




Need Statement
Over 34% of bike accidents are caused by other cars on the road because a biker isn't able to constantly monitor the environment behind him. This problem affects millions of people every day, especially if they have ADHD. The outcome of Lane is to create a driver-assist system for bikes that would mitigate these interactions and save millions of lives on the road.
Inspiration
A couple of years ago, my cousin got into a really bad bike accident when a car hit him from behind at a red light. He had to go through many surgeries and didn't leave the hospital for about 6 months. This was around the time Tesla and other big car companies were introducing driver assist for cars but there were still none for bikes. Fast forward a couple of years to 2021 and there still aren't any commercial driver-assist systems for bikes, which is why we decided to make it ourselves.
What it does
Lane is an app that uses Computer Vision to monitor the environment behind a biker and when a car gets too close ( < 2 feet), the app alerts the user via text-to-speech. When this occurs, the app saves the clip along with the location for the user to look back upon later on. Our current prototype is designed to attach a phone to a biker's waist with a contraption, where the camera side is facing the back.
How we built it
We used the Flutter IOS dev framework to build the User Interface and OpenCV-Python to build the Computer Vision algorithms. The Computer Vision algorithm is split up into two distinct parts, car detection and distance calculator. Car detection was built by using a list of features that describe a car and using it to compare each part of a frame to deduce if an object is a car. Similarly, the distance calculator algorithm is built by using the Pinhole Camera model, which allows us to see a mathematical relationship between coordinates on a three-dimensional space and its projection on the two-dimensional image plane. Using this model, we calculated the focal point of the camera by calibrating the camera with OpenCV, essentially by using a chessboard whose length and width were already known and using it to calculate distortion in the image and the focal length of the camera. We, then, used the focal point along with the size of the car(in meters) in the real world as well as the image (in pixels) to accurately approximate the distance between a car.
Challenges we ran into
A challenge we ran into was that the car detection algorithm was incorrectly classifying a lot of small areas as a car due to the quality of the video. After looking at the problem deeply, we realized that there was no way a car would be smaller than a certain width unless it was very far away from the bike and in that case, we don't need to monitor that car anyway until it gets much closer. So, we decided to eliminate all regions that were detected as a car but were smaller than a particular width from being passed onto the distance calculator algorithm. This solved the problem because the resulting algorithm achieved almost perfect accuracy.
Accomplishments that we're proud of
We are proud of being able to finish a working prototype of a big problem that we believe can change many lives, in under 40 hours.
What we learned
We learned that even the biggest of solutions that look like they'll require tons of expensive hardware can be prototyped with basically none.
What's next for Lane
We strongly believe that the path to market for Lane is to either create or partner with a smart helmet company in order to commercialize our product and make the user experience much better. A smart helmet would allow us to include a camera in the back along with built-in speakers for our text-to-speech model and maybe even radar sensors to better monitor the environment behind a bike. Another problem we would like to address in the future is the possibility of a car going too fast for the biker to react to our voice commands in time. To solve this problem, we would like to create more algorithms to detect fast and reckless driving in order to notify the user before such a car gets near the biker.

Log in or sign up for Devpost to join the conversation.