-
a self-tightening shoe

Inspiration
In back to the future, Nike has some self tightening shoes. While we drew inspiration from this idea, our shoe is specifically designed to slip on and be controllable without bending over, to help those with disabilities.
What it does
It is a shoe that tightens and loosens in accordance with gesture controls.
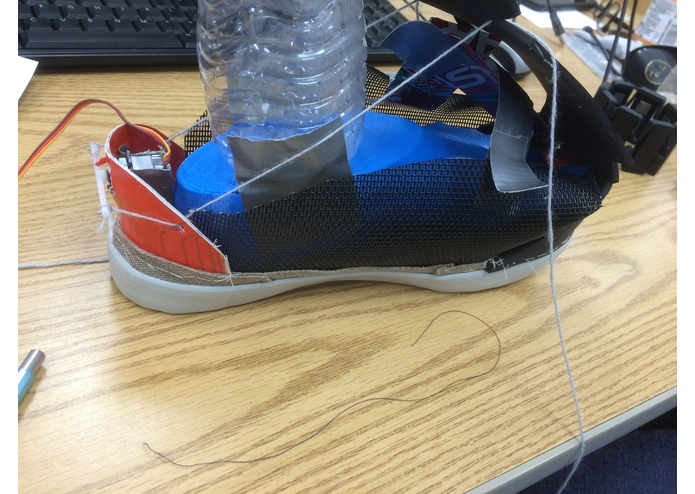
How we built it
We used a shoe as a base and attached an arduino powering a servo motor. When the servo motor rotates, it coils some string that pulls down the tongue of the shoe. The arduino gets signals to tighten or loosen the string from a myo armband, which registers gestures, such as making a fist or having an open palm.
Challenges we ran into
Scarcity of materials, especially the motor. It would have been nice to use a stepper motor instead, but we lacked the necessary driver IC.
Accomplishments that we're proud of
Creating a working proof of concept. Hacking a soda can to make a spring in the tongue of the shoe.
What we learned
Interfacing with the myo armband is surprisingly easy, especially with all the free to use software on the windows platform.
What's next for Exos
A second prototype probably with stepper motors and a different spring to loosen the shoe when the user is done using it.

Log in or sign up for Devpost to join the conversation.